A worm’s story (or star tracking on Titan mount)
Did you ever wonder how accurate was star tracking on your mount?
Well, while imaging, I noticed that the autoguider tended to always correct in roughly the same direction even though I knew my polar alignment was near perfect. Strange…
So, I finally decided to look into it (little did I know what can of worms, literally, I was getting my hands into) and downloaded PEMPRO software, very useful to acquire “hard” data on mount tracking. As a reminder, I use a Losmandy Titan mount equiped with maxon 1/50 motors. The polar alignment is accurate to 9′ East and 7′ North according to Gemini 1 L4 alignment messages. I took an image on myAtik11000-CM (pixels of 9uMx9uM) at the C14 focal length (3910mm), first slewing the mount in RA and DEC before exposing for 10 minutes:

On this image the nearly horizontal axis (X) of the image corresponds to the DEC axis while the vertical axis (Y) is the RA axis. Looking at the finer stars on the image, it looks like there is a strong periodic error, as the stars don’t appear as points but as short lines in the RA axis.
Only it is not Periodic error. By voluntarily unsetting the polar alignment in azimut to cause a star drift in declination only, the second picture show clearly what is happening.

As a reminder, the X axis is declination and Y is Right Ascension. We see the drift in declination to the right which is normal considering the voluntary offset of polar alignment in Azimuth, but, in addition to the Periodic Error visible as a sinewave, we notice the stars are moving up in the Y axis of the image, which is Right ascension. The sinewaves should be horizontal, not at a angle. To produce this drift in the Y axis, the only explanation is that the tracking speed is not correct.
Now let’s get “under the hood” of the Losmandy Gemini 1 Level 4 controller. Losmandy states:
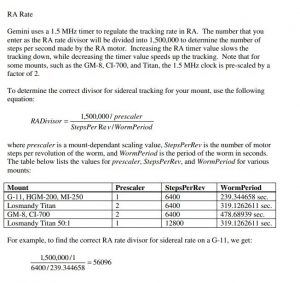
For my mount, the worm screw needs to make a complete turn in 319.1262 Seconds (the crown it drives has 270 teeth) so the stepper motor driving it needs 12800 steps for a complete turn. Gemini microcontroller timebase is 1.5 MHz. It’s a software counter (RA tracking divisor) which sets the rotation frequency of the wormscrew. RA tracking divisor value is calculated as follow:
RA tracking divisor =1500000/(12800/319.1262611)=37397.60
When we look into the Gemini parameters through the ASCOM interface (advanced parameters button) we find that the value is set to 37398 which is 37397.6 rounded up.
So, something does not fit theory as my mount tracking appears to be too fast. At this stage, we do not know where the error stems from, but one thing is for sure:
Earth makes one turn in 23 hours 56 minutes and 4 Seconds or 86164 seconds. The crown gear has 270 teeth. the mount turns by one tooth for every turn of the wormscrew, so, we need to perform one turn every 86164/270= 319.1259259 seconds
This value is not far from Losmandy’s given worm period of 319.1262 so everything is fine here. Another possibility is that more than 12800 motor steps are made since the tracking speed is too fast, or the 1.5MHz quartz frequency is also faster.
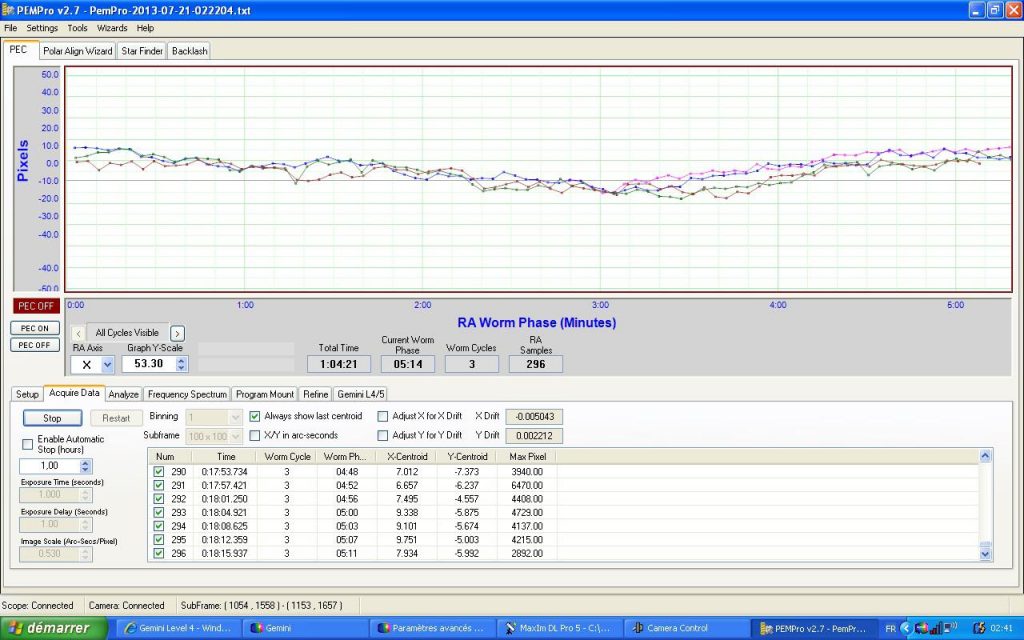
So, it is time to use the Gemini “comet rate” which allows me to set my own RA tracking divisor. But first, we need a precise measurement of periodic error and RA drift so I dowloaded PEMPRO https://www.siriusimaging.com/downloads/PEMProV3.exe Here is the graph of tracking in sidereal rate
We can clearly see that on top of periodic error, there is a clear drift in Right Ascension. With comet rate selected, let’s adjust the RA tracking divisor from 37398 to 37500 to slow it down.

and check out the effect:

Perfect! Tracking speed is pretty much ok except that periodic error is not 319.1262 Seconds as PEMPRO still thinks it is,, so there is a phaseshift to the right of the graph after each period. To be noted that periodic error is pretty good as it is smooth and the amplitude is 9″.
So, there is a way to fine tune Titan’s Losmandy Gemini 1 Level 4 tracking speed. But, the mount is sold as a “premium” product so we’d expect swiss precision from it. A bit like buying a Mercedes that drives like a Kia (I’m a Corvette man myself)!